Python Raytracer
This Python raytracer implements a robust rendering system capable of producing realistic images with various optical effects. Rendering is split into two classes, Scene and Geometry classes. The Scene class manages the casting and tracing of rays, while the Geometry class handles the intersection of rays with scene objects.
You can find the full code for this raytracer here.
How Rays are Cast
The raytracer uses a camera model to cast rays into the scene. For each pixel in the output image, one or more rays are generated and traced through the scene.
Camera setup:
- The camera is defined by its position, look-at point, up vector, and field of view.
- A view plane is calculated based on the camera's properties and the image dimensions.
Ray generation:
- For each pixel, a ray is created from the camera position through the corresponding point on the view plane.
- If jittering is enabled, multiple rays are generated per pixel with slight random offsets for anti-aliasing.
Ray tracing:
- Each ray is tested for intersection with all objects in the scene.
- The closest intersection point is determined.
- Lighting calculations are performed at the intersection point.
Pseudocode for ray generation:
def generate_rays(self):
for y in range(self.height):
for x in range(self.width):
ray = self.generate_ray(x, y)
self.rays.append(ray)
Geometry and Collision Detection
The raytracer supports various geometric primitives and complex shapes. Each geometry type implements its own intersection method, allowing for efficient and accurate ray-object collision detection.
Sphere Collision
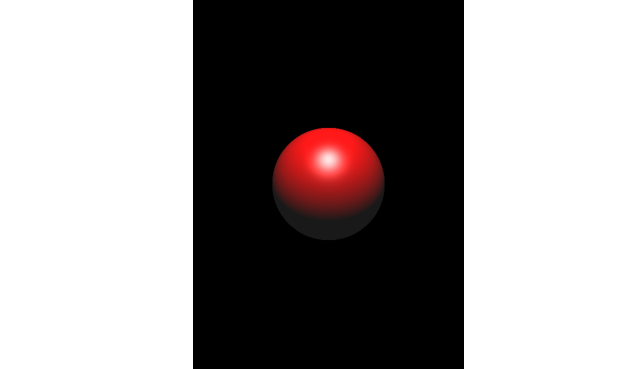
Sphere intersection is one of the simplest and most efficient to calculate. The process involves:
- Computing the discriminant of the quadratic equation formed by the ray and sphere.
- If the discriminant is negative, there's no intersection.
- If positive, calculate the intersection points and choose the nearest one in front of the ray origin.
def sphere_intersect(ray, sphere):
L = ray.origin - sphere.center
a = dot(ray.direction, ray.direction)
b = 2 * dot(ray.direction, L)
c = dot(L, L) - sphere.radius**2
discriminant = b**2 - 4*a*c
if discriminant < 0:
return False
t = (-b - sqrt(discriminant)) / (2*a)
if t > 0:
return t
return False
The raytracer also supports moving spheres, interpolating the sphere's position based on the ray's time parameter for motion blur effects.
Box Collision (AABB)
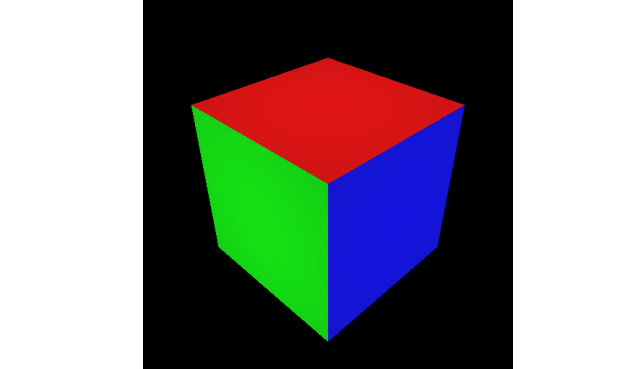
Axis-Aligned Bounding Box (AABB) intersection is implemented using the slab method:
- Calculate intersections with each pair of parallel planes defined by the box.
- Find the latest entry point and earliest exit point across all dimensions.
- If the entry point is before the exit point and the exit point is positive, there's an intersection.
def aabb_intersect(ray, aabb):
t_min = (aabb.min - ray.origin) / ray.direction
t_max = (aabb.max - ray.origin) / ray.direction
t1 = min(t_min, t_max)
t2 = max(t_min, t_max)
t_near = max(t1.x, t1.y, t1.z)
t_far = min(t2.x, t2.y, t2.z)
if t_near <= t_far and t_far > 0:
return t_near
return False
Plane Collision
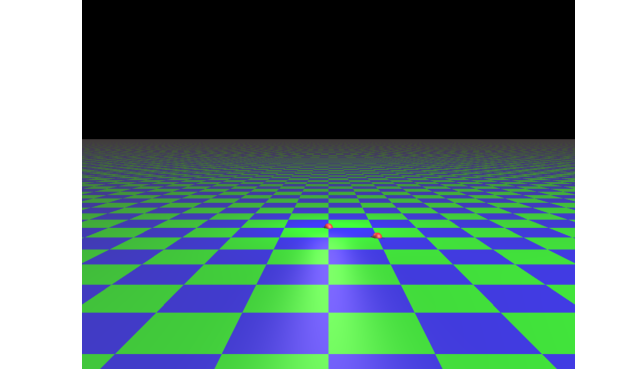
Plane intersection is straightforward:
- Calculate the denominator (dot product of plane normal and ray direction).
- If the denominator is near zero, the ray is parallel to the plane.
- Otherwise, calculate the intersection point and check if it's in front of the ray origin.
def plane_intersect(ray, plane):
denominator = dot(ray.direction, plane.normal)
if abs(denominator) < 1e-6:
return False
t = dot(plane.point - ray.origin, plane.normal) / denominator
This implementation also supports a checkerboard pattern for planes with two materials.
Meshes
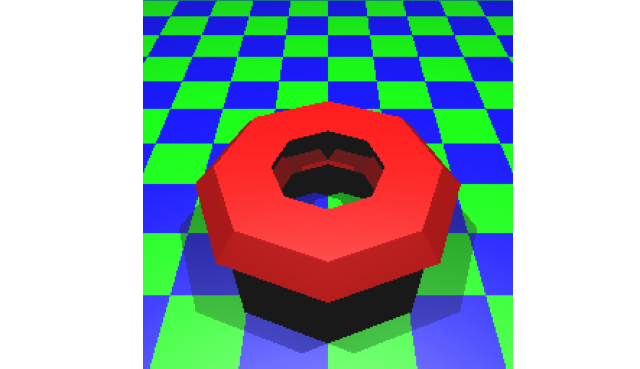
Mesh intersection involves testing against each triangle in the mesh:
- For each face in the mesh, perform a ray-triangle intersection test.
- Use barycentric coordinates to determine if the intersection point is inside the triangle.
- Keep track of the nearest intersection point.
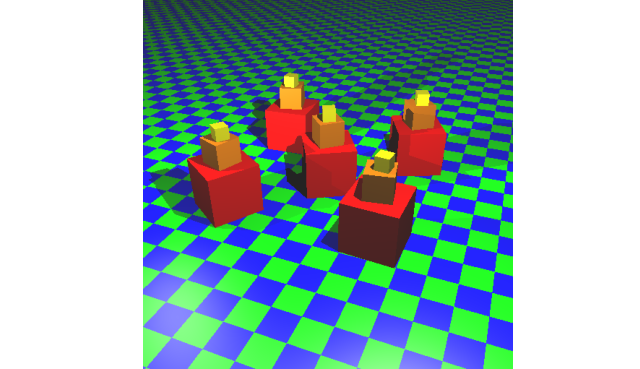
This method can be computationally expensive for complex meshes, so bounding volume hierarchies can be used to optimize the ray-tracing process (as demonstrated above).
Shadows
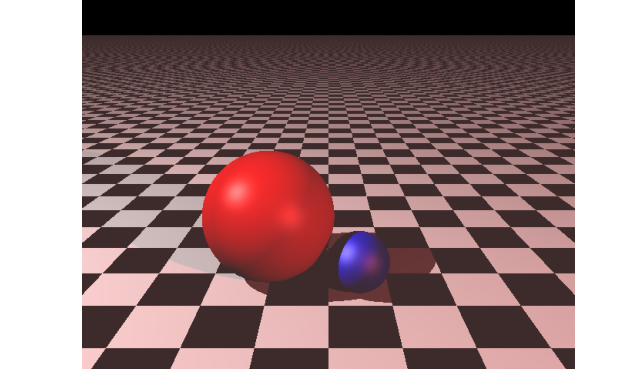
Shadows are implemented by casting secondary rays from intersection points towards light sources. If an object blocks the path to a light source, that point is considered to be in shadow for that particular light.
Reflection
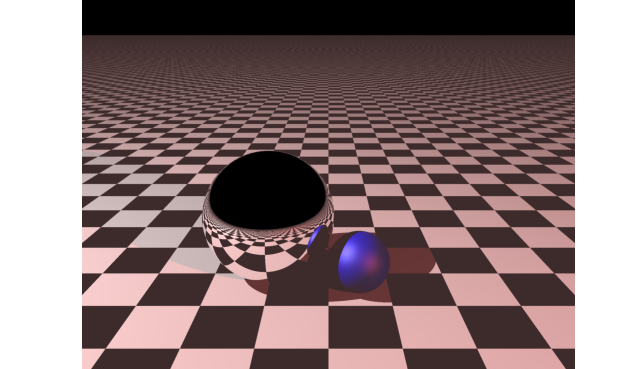
Reflection is handled by generating new rays at intersection points where the material is reflective. The direction of these reflected rays is calculated using the law of reflection:
def reflect(direction, normal):
return direction - 2 * dot(direction, normal) * normal
When a reflective surface is encountered, a new ray is cast in the reflected direction, and the color from this reflected ray is combined with the local color of the object.
Refraction
Refraction occurs when a ray passes through a transparent material with a different refractive index. The raytracer implements refraction using Snell's law and the Fresnel equations to determine the direction and intensity of the refracted ray. I found this post useful for understanding.
The process involves:
- Calculating the angle of refraction based on the incident angle and the refractive indices of the materials.
- Determining if total internal reflection occurs.
- Generating a new ray in the refracted direction.
- Tracing this refracted ray through the scene.
The calc_refracting_ray method handles the complex calculations required for accurate refraction, including handling cases of total internal reflection (introducing an upper limit to the depth of a ray).
Antialiasing
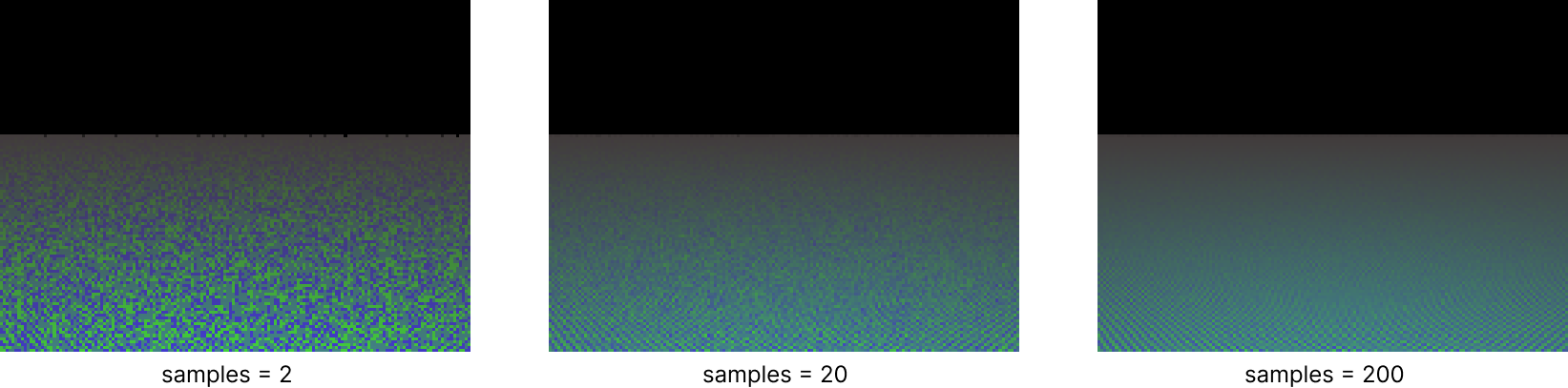
Antialiasing is a crucial technique in ray tracing that helps reduce the jagged edges (aliasing artifacts) that often appear in rendered images, especially along the boundaries of objects or in areas with high contrast.
Implementation:
- The raytracer implements a simple yet effective form of antialiasing through supersampling:
- For each pixel, multiple rays are cast with slight offsets, at random.
if self.jitter: random_i = i + random.random() random_j = j + random.random() else: random_i = i random_j = j - These jittered rays are used to sample the scene at slightly different positions within the pixel's area.
- The results from these multiple samples are averaged to produce the final color for the pixel:
for _ in range(self.samples): ray = self.generate_ray(i, j, left, right, top, bottom, u, v, w, d) colour += self.trace_ray(ray) colour /= self.samples # Average the color
Although only one possible technique, this effectively smooths out edges and reduces aliasing artifacts, resulting in a more visually pleasing image.
Extra techniques
Two advanced effects that significantly enhance the realism of rendered images are motion blur and depth of field blur. These effects simulate the behavior of physical cameras, adding a level of photorealism to the rendered scenes.
Motion Blur
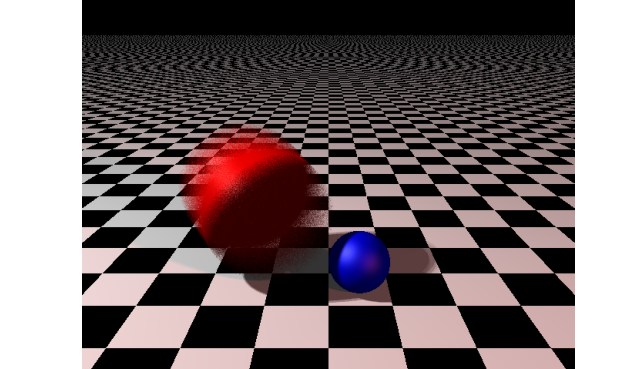
Motion blur simulates the effect of movement during the camera's exposure time. It's particularly effective for fast-moving objects or scenes with rapid camera movement.
Implementation:
- Each ray is assigned a random time value within the exposure interval (e.g., 0.0 to 0.2).
- Moving objects interpolate their position based on this time value.
For spheres as an example, the center position is interpolated:
def sphere_intersect(ray, sphere):
# ...
center = sphere.center + sphere.velocity \* ray.time # Use interpolated center
# ...
The final color of a pixel is the average of multiple samples taken at different times.
This approach creates a realistic motion blur effect, with fast-moving objects appearing smeared in the direction of their movement.
Depth of Field Blur
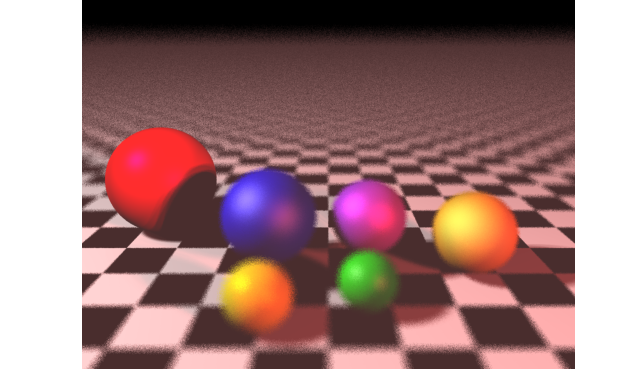
Depth of field (DoF) simulates the focus properties of physical camera lenses, where objects at a certain distance are in sharp focus while objects closer or farther appear blurred.
Implementation:
-
Define an aperture size and a focal distance.
-
For each pixel, generate multiple rays with origins slightly offset on the camera lens plane:
def generate_ray(i, j, left, right, top, bottom, u, v, w, d): if self.dof: rd = self.aperture / 2 * self.random_in_unit_disk() offset = u * rd[0] + v * rd[1] focus_point = self.position + self.focus_dist * ray_dir ray_origin = self.position + offset ray_dir = glm.normalize(focus_point - ray_origin) else: ray_origin = self.position return hc.Ray(ray_origin, ray_dir, ray_time)The
random_in_unit_disk()function generates random points within a unit disk:def random_in_unit_disk(self): while True: p = np.array([random.uniform(-1, 1), random.uniform(-1, 1), 0]) if np.dot(p, p) < 1: return p -
Trace multiple rays for each pixel and average the results.
This technique creates a realistic depth of field effect:
- Objects at the focal distance remain sharp.
- Objects closer or farther than the focal distance become progressively blurred.
- The size of the aperture controls the amount of blur (larger aperture = more blur).
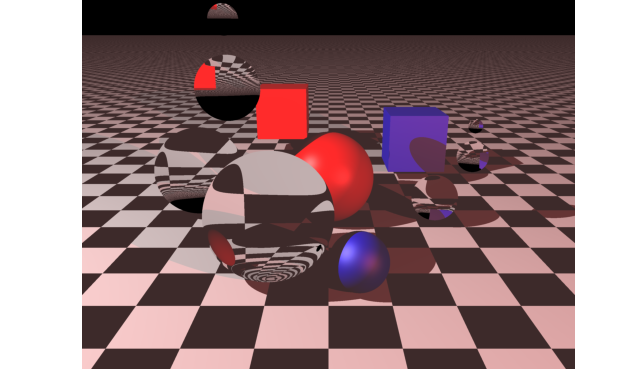
Constructing a novel scene
With the addition of a simple quadric collision detector, the following scene was rendered:
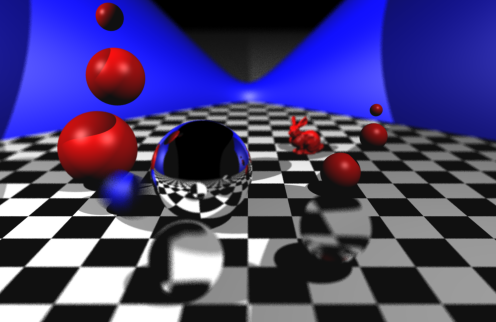
Conclusion
This raytracer demonstrates the power of creating realistic images with a set of simple rules. This is not everything that can be done with ray tracing; with further development, procedures to handle HDR mapping, soft shadows, UV mapping and more can be implemented.